ScalableBody: A Telepresence Robot that Supports Face Position Matching using a Vertical Actuator
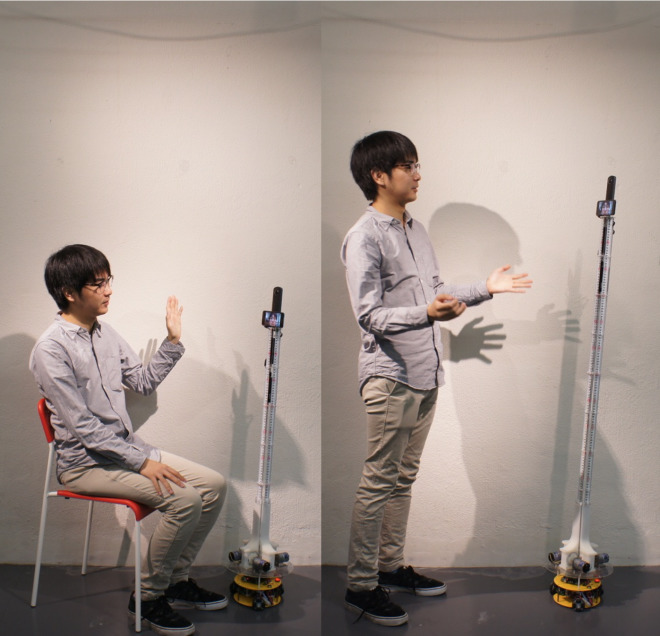

Seeing one’s partner’s face during remote conversation is one of the most important factors for effective communication. When us- ing a telepresence robot, matching face positions with one’s partner is sometimes difficult, because face position varies in different sit- uations (e.g., standing or sitting). However, existing telepresence robots cannot change their height. Moreover, due to limited cam- era angle, the conversation partner’s face is often partly cut off in the camera view. Therefore, users cannot communicate while see- ing each other’s faces. To overcome these problems, we designed a telepresence robot called ScalableBody. ScalableBody has a ver- tical actuator that allows it to change its height and an omnidirec- tional camera that provides a wide view. The robot facilitates com- munication for different contexts using vertical actuation to match the conversation partners’ face positions. Furthermore, the operator can see a partner’s face in any direction through an omnidirectional camera. This approach can also provide users with the experience of being a different height, as if a giant or a child. In this paper, we describe the vertical actuator mechanism and report our user study on the telepresence robot.
本研究では非言語情報の1つである「身長」に着目し,身長を自由に変更可能なテレプレゼンスロボット「ScalableBody」を提案する. 本研究の目的は,テレプレゼンスロボットと対話相手との身長差やカメラの画角によって発生するコミュニケーション上の課題を解決し,より円滑な遠隔コミュニケーションを実現することである.ScalableBodyはその身長を自由に変更することで,身長の異なる対話相手と顔や目線の位置を合わせることを可能にする.対話相手が会話中に起立・着席するなど姿勢を変えた場合に目線位置が変わる状況にも,動的に身長を変更することで対応でできる.また,ScalableBodyは頭頂部に全周囲カメラを搭載しており,カメラの画角から対話相手の顔が外れ見えなくなることはない.本稿では,ScalableBodyを構成する伸縮機構や操作インタフェースについて解説するとともに,ユーザスタディの結果を通して得られた発見を報告する.
References
- 松田暁, 味八木崇, 暦本純一, 伸縮機構と全周囲映像を用いた身長可変型テレプレゼンスロボットの提案. ヒューマンインタフェース学会論文誌 Vol.20, No.3, 2018. DOI: 10.11184/his.20.3_289
- Akira Matsuda, Takashi Miyaki, and Jun Rekimoto. 2017. ScalableBody: a telepresence robot that supports face position matching using a vertical actuator. In Proceedings of the 8th Augmented Human International Conference (AH ’17). ACM, New York, NY, USA, , Article 13 , 9 pages. DOI: 10.1145/3041164.3041182
- Akira Matsuda and Jun Rekimoto. 2016. ScalableBody: A Telepresence Robot Supporting Socially Acceptable Interactions and Human Augmentation through Vertical Actuation. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology (UIST ’16 Adjunct). ACM, New York, NY, USA, 103-105. DOI: 10.1145/2984751.2985718
- Akira Matsuda, Jun Rekimoto. ScalableBody : A Telepresence Robot with Vertical Actuation for Face-to-face Communication and Human Augmentation. 1 st Asian Workshop on User Interface (AUI 2016) (国際ワークショップでの口頭 発表,査読有り)